SYMPHONI™ is up to 5X more efficient without compromising critical motion processes. Coupled with unparalleled speed, ATS provides a reliable and cost-effective solution for all your automated assembly needs.


SYMPHONI achieves high speeds and delivers versatility without sacrificing gentle handling, critical process time, and precision.
The systems are configurable for a wide range of products, from simple two-piece assemblies to highly complex products having dozens of components and specialized processes. SYMPHONI systems scale to meet a product’s changing needs as it progresses through its life cycle – from low-volume samples to high-volume production.
SYMPHONI’s modular building blocks are designed for plug-and-play configuration, enabling easy retooling, reordering, and repurposing to accommodate product changes.
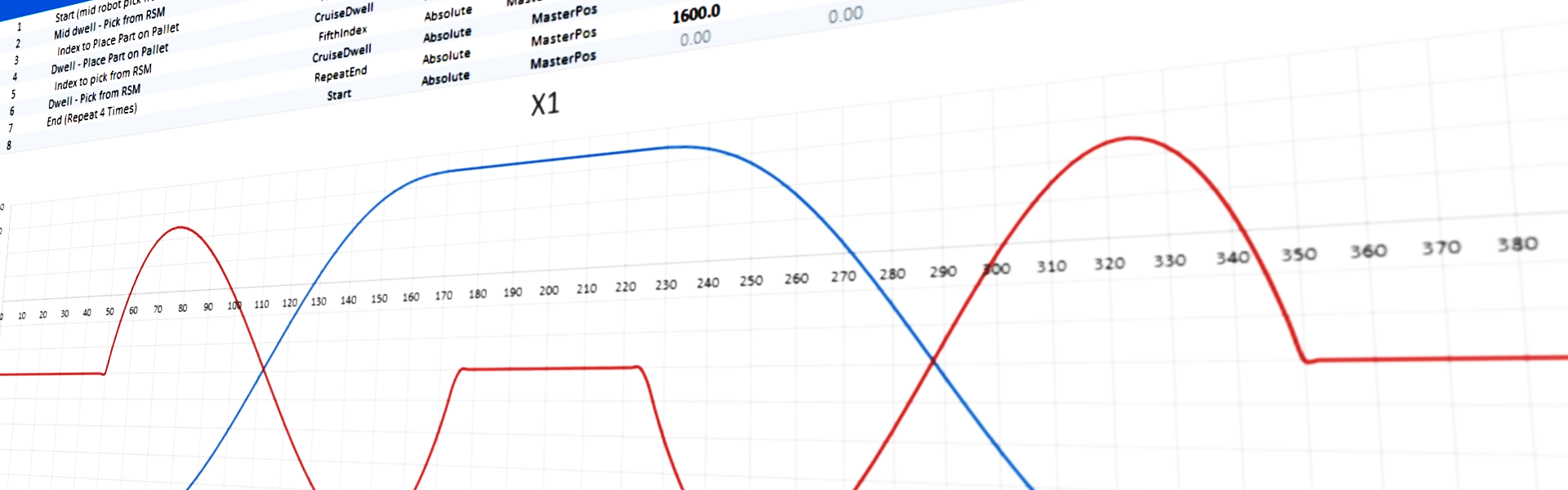
Its control system directs and synchronizes all functions, eliminating non-value-added movement waste from cycle time, thus ensuring fluid and seamless automation performance.
Digital assembly automation technology featuring an unmatched combination of speed, versatility, and precision in a scalable, modular platform.

SYMPHONI’s synchronous motion, digital flexibility, centralized coordination, and decentralized configuration result in high throughput, optimized cycle times, greater equipment utilization, and gentler parts handling.

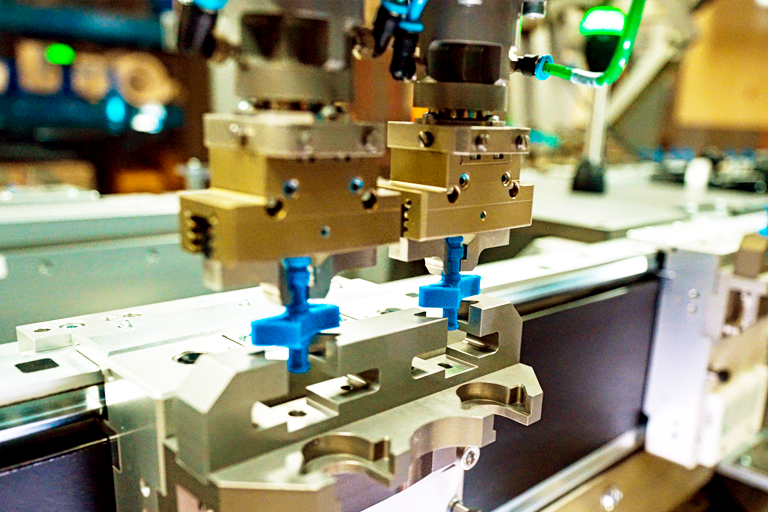
SYMPHONI is an innovative assembly system that combines the best features of indexing motion, continuous motion, pallets, and robots.
SYMPHONI’s modular building blocks are designed for plug-and-play configuration, enabling easy retooling, reordering, and repurposing to accommodate product changes.
Its control system directs and synchronizes all functions, eliminating non-value-added movement (waste) from cycle time, thus ensuring fluid and seamless automation performance.

SYMPHONI is designed to assemble small and discrete components in the medical device and consumer product (CPG) industries. This patented and market-proven solution is configurable, modular, and scalable.
SYMPHONI’s digital platform is a powerful tool comprised of several core building blocks that work together to deliver exceptional performance. These building blocks are divided into four main categories:
Together, they form a cohesive and efficient system that is greater than the sum of its parts.

Through efficient automation, SYMPHONI can minimize waste and reduce carbon footprint for the Life Science and Consumer Packaged Goods industries, while producing high-quality goods.
SYMPHONI’s advanced technologies and innovative processes contribute to more sustainable manufacturing practices, such as reduced energy consumption, optimized resource utilization, and lowered water and land usage.
With the addition of ATS’ Illuminate™ Energy and Efficiency Module, you can measure in real time pneumatic and energy consumption per part/by batch to easily identify and report on carbon footprint.